L293D เทียบกับ L298N: ความแตกต่างระหว่าง L293D และ L298N
2024-07-12
5412
แคตตาล็อก
อะไรคือความแตกต่างของ L293D และ L298N โดยพื้นฐาน?ปัจจัยที่โดดเด่นอย่างหนึ่งคือความสามารถในการจัดการปัจจุบัน
ที่ L293D ได้รับการออกแบบมาเพื่อจัดการกระแสไฟฟ้าต่อเนื่องสูงถึง 600mA ต่อช่องโดยมีกระแสสูงสุดถึง 1.2A ในช่วงเวลาสั้น ๆ
ที่ l298nในทางกลับกันสามารถจัดการกระแสไฟฟ้าต่อเนื่องของ 2A ต่อช่องโดยมียอดสูงสุดถึง 3Aความแตกต่างอย่างมีนัยสำคัญในกำลังการผลิตปัจจุบัน L298N เป็นความเหมาะสมที่ดีกว่าสำหรับแอปพลิเคชันพลังงานที่สูงขึ้น
ลองนึกภาพคุณกำลังทำงานในโครงการหุ่นยนต์ที่ต้องการมอเตอร์ขนาดใหญ่สำหรับงานที่ต้องการมากขึ้นวิศวกรมักจะเปลี่ยนไปสู่ L298N เนื่องจากความสามารถในการจัดการปัจจุบันที่เหนือกว่าตัวเลือกนี้สอดคล้องกับความต้องการการดำเนินงานของโครงการเฉพาะของคุณหรือไม่?
การกระจายพลังงานและการจัดการความร้อนเป็นปัจจัยที่ควรพิจารณาL298N ซึ่งเป็นส่วนประกอบที่มีขนาดใหญ่และแข็งแกร่งยิ่งขึ้นได้เพิ่มความสามารถในการกระจายความร้อนฮีทซิงค์แบบบูรณาการช่วยจัดการความร้อนได้ดีขึ้นในช่วงเวลาที่เพิ่มขึ้นของการจับกระแสสูง
ในทางตรงกันข้าม L293D ที่ขาดฮีทซิงค์เฉพาะอาจต้องใช้โซลูชันการระบายความร้อนเพิ่มเติมหรือฮีทซิงค์เพื่อป้องกันความร้อนสูงเกินไปในสถานการณ์โหลดสูง
คิดถึงมือสมัครเล่นที่ใช้ทั้งสองคนขับรถในโครงการต่าง ๆฮีทซิงค์ในตัวของ L298N ของ L298N มักจะให้บริการโซลูชันที่เชื่อถือได้และมีประสิทธิภาพมากขึ้นสำหรับการดำเนินงานที่ยั่งยืนภายใต้โหลดสูงข้อมูลเชิงลึกนี้ตอกย้ำความสำคัญของการพิจารณาความร้อนโดยเฉพาะอย่างยิ่งในโครงการที่มีระยะเวลาการดำเนินงานขยาย
มีความแตกต่างอย่างมากในช่วงแรงดันไฟฟ้าระหว่างไดรเวอร์ทั้งสองนี้หรือไม่?ใช่แล้วล่ะ.
L293D ทำงานในช่วงแรงดันไฟฟ้า 4.5V ถึง 36V ทำให้เหมาะสำหรับการใช้งานแรงดันไฟฟ้าต่ำถึงปานกลาง
ในทางกลับกัน L298N รองรับช่วงแรงดันไฟฟ้าที่กว้างขึ้นตั้งแต่ 4.8V ถึง 46V ช่วยให้มีความยืดหยุ่นมากขึ้นและใช้งานในแอปพลิเคชันแรงดันไฟฟ้าที่สูงขึ้น
ในแง่ปฏิบัติซึ่งหมายความว่าเมื่อทำงานบนแพลตฟอร์มอเนกประสงค์ที่อาจต้องใช้ระดับแรงดันไฟฟ้าที่แตกต่างกันเช่นระบบอัตโนมัติ DIY หรือแพลตฟอร์มหุ่นยนต์ที่หลากหลายช่วงแรงดันไฟฟ้าที่กว้างขึ้นของ L298N ให้ประโยชน์ที่แตกต่างกันความยืดหยุ่นนี้ทำให้การจัดการพลังงานง่ายขึ้นในส่วนประกอบที่แตกต่างกันเพิ่มประสิทธิภาพการออกแบบโดยรวม
คุณสมบัติการป้องกันล่ะ?L293D มาพร้อมกับไดโอด flyback ในตัวซึ่งช่วยป้องกันอุปกรณ์จากแรงดันไฟฟ้าที่เกิดจากโหลดอุปนัยของมอเตอร์ในทางตรงกันข้าม L298N มักจะต้องใช้ไดโอดภายนอกเพื่อจัดการหนามเหล่านี้
แม้ว่าการรวมไดโอดภายนอกสามารถควบคุมการออกแบบได้มากขึ้นและสามารถปรับปรุงประสิทธิภาพได้ แต่ก็เพิ่มความซับซ้อนให้กับการออกแบบวงจร
จากมุมมองของการออกแบบที่มีความคล่องตัวและความสะดวกในการประกอบนักพัฒนาระบบฝังตัวมักจะชอบ L293D สำหรับโครงการที่ง่ายกว่าหรือวัตถุประสงค์ทางการศึกษาการรวมกลไกการป้องกันภายในช่วยลดขั้นตอนการประกอบทำให้เป็นตัวเลือกที่เหมาะสำหรับโครงการหรือแอปพลิเคชันเริ่มต้นที่ความเรียบง่ายและความกะทัดรัดจัดลำดับความสำคัญ
ข้อมูลเชิงลึกที่สำคัญคือตัวเลือกระหว่าง L293D และ L298N ควรได้รับการชี้นำโดยข้อกำหนดของโครงการเฉพาะในขณะที่ L298N ให้กำลังการผลิตในปัจจุบันที่สูงขึ้นการจัดการความร้อนที่ดีขึ้นและช่วงแรงดันไฟฟ้าที่กว้างขึ้นความเรียบง่ายและคุณสมบัติแบบบูรณาการของ L293D ทำให้ไม่มีค่าน้อยลงสำหรับโครงการที่มีความต้องการน้อยลงหรือมีขนาดกะทัดรัด
ไม่ว่าจะเป็นการจัดการกับความซับซ้อนพลังงานหรือข้อ จำกัด ทางความร้อนความต้องการตามบริบทจะมีผลโดยตรงต่อตัวเลือกที่ดีที่สุดของไดรเวอร์มอเตอร์
L293D คืออะไร?

L293D ซึ่งเป็นตัวขับมอเตอร์คู่ H-Bridge ที่พัฒนาโดย Stmicroelectronics ใช้สำหรับการควบคุม DC และ Stepper Motors
ลักษณะเฉพาะ:
- ประสิทธิภาพสูง
- การใช้พลังงานต่ำ
- ความน่าเชื่อถือที่แข็งแกร่ง
แอปพลิเคชันครอบคลุมในสาขาต่าง ๆ :
- อุปกรณ์สมาร์ทโฮม
- หุ่นยนต์
- ยานพาหนะอัจฉริยะ
ด้วยความต้องการแรงดันไฟฟ้าอินพุต 7V L293D ทำงานภายในช่วงแรงดันไฟฟ้าของแหล่งจ่ายไฟทำงานตั้งแต่ 4.5V ถึง 36Vช่วงกว้างนี้ช่วยให้มั่นใจได้ว่าการปรับตัวในสถานการณ์ต่าง ๆการออกแบบที่ทนทานของมันรองรับการทำงานภายในช่วงอุณหภูมิ -40 ° C ถึง 150 ° Cนอกจากนี้ชิปยังมีกระแสการทำงานที่ต่ำอย่างน่าประทับใจเพียง 2ma และสามารถส่งกระแสเอาต์พุตสูงถึง 600ma พร้อมเอาต์พุตคู่ที่เพิ่มการปฏิบัติจริง
ส่วนประกอบทางเลือก ได้แก่ :
- L293DD
- l293e
L293D จัดการเพื่อรักษาการใช้พลังงานต่ำเช่นนี้ในขณะที่ส่งมอบกระแสไฟฟ้าสูงได้อย่างไรนี่เป็นเพราะวงจรภายในที่มีประสิทธิภาพซึ่งช่วยลดการกระจายความร้อนในระหว่างการทำงาน
ในการใช้งานจริงการปรับใช้ L293D มักแสดงประสิทธิภาพตัวอย่างเช่น:
- วิศวกรมักใช้ไดรเวอร์นี้ในการสร้างหุ่นยนต์ขนาดเล็กและระบบอัตโนมัติที่ต้องใช้การควบคุมมอเตอร์ที่แม่นยำ
- ในต้นแบบยานพาหนะอัตโนมัติ L293D จัดการฟังก์ชั่นมอเตอร์เพื่อให้ได้การนำทางที่ราบรื่น
จากมุมมองของฉัน L293D โดดเด่นเนื่องจากความเก่งกาจแม้จะมีการมาถึงของไดรเวอร์มอเตอร์รุ่นใหม่ความสมดุลของชิปนี้ของความเรียบง่ายและความสามารถมักจะทำให้เป็นทางเลือกที่ต้องการโดยเฉพาะอย่างยิ่งสำหรับวัตถุประสงค์ทางการศึกษาและโครงการ DIYการตั้งค่านี้บอกใบ้ถึงหลักการที่กว้างขึ้นในอุปกรณ์อิเล็กทรอนิกส์: โซลูชั่นที่มีประสิทธิภาพมากที่สุดไม่ได้เป็นนวัตกรรมล่าสุดเสมอไป แต่เป็นสิ่งที่รวมความน่าเชื่อถือความเรียบง่ายและประสิทธิภาพ
L298N คืออะไร?
L298N ชิปไดรเวอร์มอเตอร์ที่ผลิตโดย STMICROELTRONICS ได้รับการออกแบบทางวิศวกรรมสำหรับการควบคุมมอเตอร์ DC และมอเตอร์สเต็ปเปอร์ชิปอเนกประสงค์นี้รวมฟังก์ชั่นหลายฟังก์ชันรวมถึงการควบคุมตรรกะขั้นตอนการส่งออกพลังงานการชดเชยอุณหภูมิและวงจรป้องกันการโอเวอร์โหลด
ด้วยการประมวลผลสัญญาณควบคุมต่างๆ L298N สามารถทำให้มอเตอร์ไปข้างหน้าและหมุนย้อนกลับรวมถึงการควบคุมความเร็ว PWMสถานการณ์เฉพาะใดที่จะได้รับประโยชน์มากที่สุดจากการควบคุมที่หลากหลายเช่นนี้?ตัวอย่างเช่นแอปพลิเคชันหุ่นยนต์มักต้องการการเคลื่อนไหวของมอเตอร์ที่แม่นยำ
ชิปนี้มีความสามารถในการส่งมอบกระแสเอาท์พุทสูงสุด 2A ซึ่งทำให้เหมาะสำหรับแอพพลิเคชั่นควบคุมมอเตอร์ที่หลากหลายการดำเนินงานภายในช่วงแรงดันไฟฟ้าของแหล่งจ่ายไฟ 2.5V ถึง 48V นั้นมีความยืดหยุ่นที่หลากหลายเพื่อตอบสนองความต้องการมอเตอร์ที่แตกต่างกันมีชิปทางเลือกหรือไม่?ใช่การเปลี่ยนสำหรับ L298N รวมถึง:
- L298P
- L293DD
- L6206N
- L6207QTR
- L6225N
- L6227DTR
เหตุใดจึงควรเข้าใจแอปพลิเคชั่นที่ใช้งานได้จริงของ L298N?ในหุ่นยนต์การควบคุมความเร็วและทิศทางของมอเตอร์เป็นสิ่งจำเป็นสำหรับงานที่ต้องใช้การเคลื่อนไหวที่แม่นยำตัวอย่างเช่นการนำทางผ่านสภาพแวดล้อมที่ซับซ้อนจะเป็นไปได้ด้วยการควบคุมมอเตอร์ที่แม่นยำในการศึกษา STEM L298N มักใช้เพราะการออกแบบที่แข็งแกร่งและความอดทนต่อความผิดพลาดเล็กน้อยเป็นแพลตฟอร์มการเรียนรู้เชิงปฏิบัติสำหรับนักเรียน
อีกแง่มุมหนึ่งของการออกแบบของ L298N คือไดโอดในตัวซึ่งป้องกันแรงดันไฟฟ้าที่เกิดจากมอเตอร์อุปนัยคุณสมบัติการป้องกันนี้ช่วยป้องกันความเสียหายทั้งชิปและไมโครคอนโทรลเลอร์ที่เชื่อมต่อกันดังนั้นวิศวกรที่มีประสบการณ์จึงมักจะชอบ L298N สำหรับโครงการที่ต้องการการควบคุมมอเตอร์ที่เชื่อถือได้และการป้องกันมอเตอร์ที่สำคัญ
จากมุมมองของฉัน L298N โดดเด่นไม่เพียง แต่สำหรับข้อกำหนดทางเทคนิคเท่านั้น แต่ยังรวมถึงการใช้งานจริงความสามารถในการจัดการประเภทมอเตอร์ที่หลากหลายและกลไกการป้องกันที่แข็งแกร่งทำให้เป็นตัวเลือกที่ยอดเยี่ยมสำหรับโครงการการศึกษาและมืออาชีพซึ่งการควบคุมมอเตอร์เป็นสิ่งจำเป็น
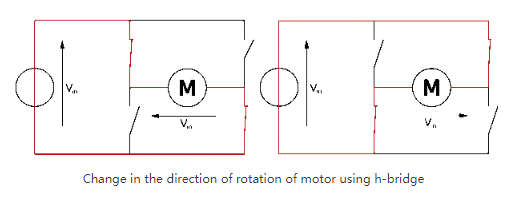
การกำหนดค่า H-Bridge คืออะไร?
H-Bridge เป็นวงจรอิเล็กทรอนิกส์ที่ออกแบบมาเพื่อสลับขั้วของแรงดันไฟฟ้าที่ใช้กับโหลดวงจรนี้มักใช้ในหุ่นยนต์และสาขาอื่น ๆ อีกมากมายเพื่อให้มอเตอร์ DC ทำงานในทิศทางไปข้างหน้าหรือไปข้างหน้าแต่ H-Bridge บรรลุสิ่งนี้ได้อย่างไร?โดยการเปลี่ยนขั้วของพลังงานที่ส่งไปยังมอเตอร์ DC หนึ่งสามารถเปลี่ยนทิศทางของการหมุนได้การกำหนดค่านี้ไม่ จำกัด เฉพาะการเปลี่ยนแปลงทิศทางนอกจากนี้ยังสามารถอำนวยความสะดวกในการเบรกและโหมดฟรีล้อ
เมื่อมีส่วนร่วมในโหมดเบรก H-Bridge ช่วยให้มอเตอร์หยุดได้อย่างรวดเร็วมันทำสิ่งนี้โดยการไหลเวียนของขั้วของมอเตอร์อย่างมีประสิทธิภาพทำให้พลังงานจลน์ของมอเตอร์กระจายไปเป็นกระแสไฟฟ้ากลไกนี้ช่วยให้การชะลอตัวได้อย่างรวดเร็วในอีกทางหนึ่งในโหมด Freewheeling มอเตอร์ค่อยๆหยุดหยุดเนื่องจากความเฉื่อยของตัวเอง
ที่น่าสนใจประสบการณ์ของมนุษย์กับวงจร H-Bridge เผยให้เห็นการใช้งานที่ใช้งานได้จริงมากขึ้นสำหรับสถานการณ์ที่ต้องการการควบคุมความเร็วและตำแหน่งของมอเตอร์ที่แม่นยำ H-Bridges มักจะถูกจับคู่กับกลไกการตอบรับเช่นตัวเข้ารหัสการรวมกันนี้ช่วยให้มั่นใจได้ถึงการปรับที่แม่นยำเพิ่มประสิทธิภาพของระบบเช่นแขนหุ่นยนต์และยานพาหนะนำทางอัตโนมัติ
ความก้าวหน้าในการออกแบบ H-Bridge ได้นำไปสู่ส่วนประกอบที่มีประสิทธิภาพและแข็งแกร่งมากขึ้นวงจรรวม H-Bridge ที่ทันสมัยในขณะนี้รวมถึงการป้องกันในตัวเช่นกระแสเกินการป้องกันการลัดวงจรและการป้องกันความร้อนมากเกินไปโดยทั่วไปแล้วสิ่งเหล่านี้ได้รับการจัดการผ่านส่วนประกอบภายนอกในการออกแบบก่อนหน้านี้การรวมคุณสมบัติเหล่านี้ไม่เพียง แต่เพิ่มความปลอดภัย แต่ยังทำให้วงจรโดยรวมง่ายขึ้นการทำให้เข้าใจง่ายนี้ทำให้ H-Bridges สามารถเข้าถึงได้มากขึ้นสำหรับนักบวชและนักเรียน
โดยสรุปการกำหนดค่า H-Bridge ยังคงเป็นองค์ประกอบที่ปรับตัวได้และสำคัญในการควบคุมมอเตอร์มันมีฟังก์ชั่นที่หลากหลาย:
- เปลี่ยนทิศทางการหมุนของมอเตอร์
- เปิดใช้งานการเบรกอย่างรวดเร็ว
- อนุญาตให้หยุดความเฉื่อย
การปรับแต่งอย่างต่อเนื่องและการปรับตัวในทางปฏิบัติของวงจร H-Bridge เน้นความสำคัญของพวกเขาในระบบอิเล็กทรอนิกส์และหุ่นยนต์ที่ทันสมัย
แผนภาพ Pinout สำหรับ L293D และ L298N
แผนภาพ Pinout สำหรับ L293D
L293D เป็นไดรเวอร์ Half-H ปัจจุบันสูงสี่เท่ามันสามารถให้กระแสไดรฟ์แบบสองทิศทางสูงถึง 600 Ma ที่แรงดันไฟฟ้าตั้งแต่ 4.5 V ถึง 36 V ไดรเวอร์นี้ได้รับความนิยมเป็นพิเศษในหุ่นยนต์และภาคยานยนต์สำหรับการควบคุมทิศทางและความเร็วมอเตอร์ DCแต่ทำไมวิศวกรมักจะพึ่งพาการใช้ L293D ในแอปพลิเคชันเหล่านี้เหตุผลหนึ่งคือความสามารถในการจัดการมอเตอร์หลายตัวและความสะดวกในการรวมเข้ากับระบบต่างๆ

ด้านล่างนี้เป็นแผนภาพ Pinout สำหรับ L293D:
- พิน 1 (เปิดใช้งาน 1,2): เปิดใช้งานสัญญาณอินพุตสำหรับพิน 2 และ 7
- พิน 2, 7 (อินพุต 1, อินพุต 2): ควบคุมเอาต์พุตที่เชื่อมต่อกับพิน 3 และ 6
- พิน 3, 6 (เอาท์พุท 1, เอาต์พุต 2): เชื่อมโยงกับขั้วมอเตอร์
- พิน 4, 5 (พื้นดิน 1, พื้นดิน 2): ติดกับพื้นแหล่งจ่ายไฟ
- PIN 8 (VCC2): จ่ายพลังงานให้กับมอเตอร์
- พิน 9 (เปิดใช้งาน 3,4): เปิดใช้งานสัญญาณอินพุตสำหรับพิน 10 และ 15
- พิน 10, 15 (อินพุต 3, อินพุต 4): ขับเอาต์พุตที่เชื่อมต่อกับพิน 11 และ 14
- พิน 11, 14 (เอาต์พุต 3, เอาต์พุต 4): เชื่อมต่อกับขั้วมอเตอร์
- พิน 12, 13 (พื้นดิน 3, พื้นดิน 4): ติดอยู่กับพื้นแหล่งจ่ายไฟ
- PIN 16 (VCC1): จัดหาแรงดันไฟฟ้าลอจิก
การเปิดใช้งานพินเป็นสิ่งสำคัญสำหรับการส่งสัญญาณที่แม่นยำไปยังไดรเวอร์มอเตอร์ตัวอย่างเช่นการเพิ่มตัวต้านทานภายนอกหรือตัวกรองบนพินที่เปิดใช้งานจะช่วยเพิ่มความเสถียรของสัญญาณและลดเสียงรบกวนได้หรือไม่?อันที่จริงการปฏิบัติดังกล่าวสามารถปรับปรุงความน่าเชื่อถือของระบบควบคุมมอเตอร์ได้อย่างมีนัยสำคัญ
แผนภาพ Pinout สำหรับ L298N
L298N เป็นไดรเวอร์มอเตอร์คู่ H-Bridge ที่เก่งในการควบคุมทิศทางและความเร็วของมอเตอร์ DC สองตัวรองรับได้ถึง 2 A ต่อเนื่องต่อเนื่องต่อช่องทางและทำงานภายในช่วงแรงดันไฟฟ้า 5 V ถึง 35 V. ไดรเวอร์นี้พบความแข็งแรงในการใช้งานยานยนต์และอุตสาหกรรมที่ต้องการความจุในปัจจุบันที่สูงขึ้น

ด้านล่างนี้เป็นแผนภาพ Pinout สำหรับ L298N:
- พิน 1 (เปิดใช้งาน A): เปิดใช้งานอินพุตสำหรับช่อง A.
- พิน 2 (อินพุต 1): ควบคุมครึ่งสะพานแรกของช่อง A.
- พิน 3 (เอาต์พุต 1): เอาต์พุตแรกสำหรับช่อง A.
- พิน 4, 5 (กราวด์): เชื่อมโยงกับแหล่งจ่ายไฟ
- พิน 6 (เอาต์พุต 2): เอาต์พุตที่สองสำหรับช่อง A.
- พิน 7 (อินพุต 2): ควบคุมสะพานครึ่งหลังของช่อง A.
- พิน 8 (VSS): จัดหาแรงดันไฟฟ้าตรรกะ
- พิน 9 (เปิดใช้งาน B): เปิดใช้งานอินพุตสำหรับช่อง B
- พิน 10 (อินพุต 3): ควบคุมครึ่งสะพานแรกของช่อง B
- พิน 11 (เอาต์พุต 3): เอาต์พุตแรกสำหรับช่อง B
- พิน 12, 13 (กราวด์): เชื่อมโยงกับแหล่งจ่ายไฟ
- พิน 14 (เอาท์พุท 4): เอาต์พุตที่สองสำหรับช่อง B
- พิน 15 (อินพุต 4): ควบคุมสะพานครึ่งหลังของช่อง B.
- PIN 16 (VSS): จัดหาแรงดันไฟฟ้ามอเตอร์
ที่น่าสนใจคือการใช้กลไกการกระจายความร้อนเช่น Sinks Heat Sinks มีบทบาทในประสิทธิภาพของ L298N เมื่อทำงานที่กระแสที่สูงขึ้นหรือไม่?การจัดการประสิทธิภาพความร้อนมักจะเป็นปัจจัย จำกัด ที่ส่งผลกระทบต่อการทำงานและอายุการใช้งานของผู้ขับขี่การใช้ Optocouplers ยังสามารถแยกสัญญาณควบคุมออกจากแหล่งจ่ายไฟมอเตอร์ซึ่งจะช่วยเพิ่มความปลอดภัยและความน่าเชื่อถือของระบบโดยรวม
ในที่สุดความเข้าใจที่ครอบคลุมและการใช้งานไดอะแกรม Pinout เหล่านี้มีความสำคัญสำหรับไดรเวอร์มอเตอร์ L293D และ L298N เพื่อให้ทำงานได้อย่างมีประสิทธิภาพไม่ว่าจะเป็นในหุ่นยนต์หรือระบบอัตโนมัติอุตสาหกรรมส่วนประกอบเหล่านี้ทำหน้าที่เป็นกระดูกสันหลังของระบบจำนวนมากดังนั้นข้อมูลเชิงลึกที่ลึกซึ้งยิ่งขึ้นเกี่ยวกับการกำหนดค่าของพวกเขาจึงเป็นประโยชน์อย่างมากสำหรับทุกคนที่เกี่ยวข้องในการออกแบบและพัฒนาในสาขาเหล่านี้
ข้อมูลจำเพาะของ L293D และ L298N
L293D และ L298N เป็นโมดูลไดรเวอร์มอเตอร์ที่ใช้กันทั่วไปสองโมดูลโดยเฉพาะในโครงการหุ่นยนต์และอิเล็กทรอนิกส์ICS เหล่านี้มีความเชี่ยวชาญในการควบคุมมอเตอร์ให้การขยายพลังงานที่จำเป็นระหว่างไมโครคอนโทรลเลอร์และมอเตอร์การขยายนี้มักจะมีความสำคัญเนื่องจากโดยทั่วไปไมโครคอนโทรลเลอร์ไม่สามารถจ่ายกระแสไฟฟ้าได้โดยตรงเพียงพอ
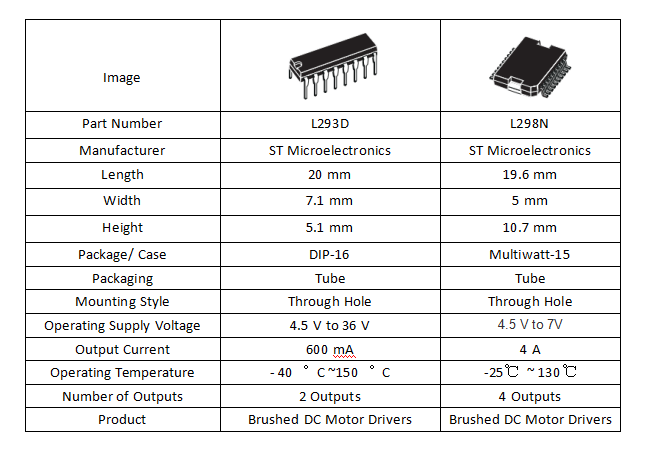
อะไรทำให้ L293D เป็นตัวเลือกที่น่าสนใจ?L293D เป็นไดรเวอร์ Half-H ปัจจุบันสูงสี่เท่ามันมีความสามารถในการขับเคลื่อนกระแสสองทิศทางสูงถึง 600mA ต่อช่องทางโดยมีกระแสไฟผลผลิตสูงสุด 1.2A ต่อช่องสำหรับพัลส์ที่ไม่ใช่ซ้ำการดำเนินงานในช่วงแรงดันไฟฟ้า 4.5V ถึง 36V L293D โดดเด่นสำหรับการรวมไดโอดแคลมป์ภายในซึ่งช่วยปกป้องวงจรจากด้านหลัง EMF ที่สร้างขึ้นโดยมอเตอร์คำถามเกิดขึ้น: ทำไมไดโอดแคลมป์ภายในจึงเป็นประโยชน์?ไดโอดเหล่านี้มีส่วนทำให้ความน่าเชื่อถือของอุปกรณ์ในโครงการหุ่นยนต์ขนาดเล็ก
ในการใช้งานจริง L293D มักจะถูกเลือกสำหรับยานพาหนะนำทางอัตโนมัติ (AGVs) และโครงการแขนหุ่นยนต์ที่เรียบง่ายการออกแบบที่ตรงไปตรงมาและความสะดวกในการบูรณาการช่วยเพิ่มความน่าดึงดูดในหมู่มือสมัครเล่นและวิศวกรตัวอย่างเช่นในการแข่งขันหุ่นยนต์ของมหาวิทยาลัยทีมอาจเลือก L293D สำหรับหุ่นยนต์มือถือขนาดกะทัดรัดเนื่องจากความสมดุลของประสิทธิภาพและความเรียบง่ายเหมาะสำหรับการแข่งขันเช่นนี้หรือไม่?อันที่จริงความสมดุลของความสะดวกและการใช้งานนั้นค่อนข้างน่าสนใจ
ในทางกลับกันทำไมเราถึงพิจารณา L298N?L298N เป็นไดรเวอร์มอเตอร์คู่ H-Bridge ที่สามารถขับรถปัจจุบันได้สูงถึง 2A ต่อช่องโดยมีความสามารถในปัจจุบันสูงสุดของ 3Aแรงดันไฟฟ้าในการดำเนินงานมีตั้งแต่ 4.5V ถึง 46V ทำให้เหมาะสำหรับแอพพลิเคชั่นที่กว้างขึ้นรวมถึงมอเตอร์ที่มีความต้องการพลังงานที่ต้องการมากขึ้นซึ่งแตกต่างจาก L293D, L298N ไม่มีไดโอดแคลมป์ภายในซึ่งจำเป็นต้องใช้ไดโอดภายนอกเพื่อป้องกัน EMF ด้านหลังอย่างไรก็ตามเรื่องนี้ความทนทานของ L298N และความสามารถในปัจจุบันที่สูงขึ้นทำให้เหมาะสำหรับการใช้งานหุ่นยนต์ที่ซับซ้อนและทรงพลังมากขึ้น
ผู้เชี่ยวชาญมักใช้ L298N ในโครงการขั้นสูงเช่นเครื่องจักรอัตโนมัติและแพลตฟอร์มหุ่นยนต์ขนาดใหญ่ลองนึกภาพการตั้งค่าอุตสาหกรรม: L298N อาจถูกเลือกเพื่อขับเคลื่อนมอเตอร์ของระบบสายพานลำเลียงเนื่องจากความสามารถในการจัดการกับโหลดปัจจุบันที่สูงขึ้นและประสิทธิภาพที่แข็งแกร่งในสภาวะที่รุนแรงเป็นตัวเลือกที่ดีที่สุดสำหรับการใช้งานอุตสาหกรรมหรือไม่?ความทนทานของมันแสดงให้เห็นเช่นนั้น
การประเมินทั้งสอง ICS เราต้องชั่งน้ำหนักการแลกเปลี่ยนระหว่างกำลังการผลิตปัจจุบันคุณสมบัติการป้องกันและความสะดวกในการรวมสำหรับโครงการขนาดเล็กที่ความเรียบง่ายและการปรับใช้อย่างรวดเร็วมีค่าที่สูงขึ้น L293D มักจะเป็นที่ต้องการในทางกลับกันสำหรับโครงการที่ต้องการพลังงานที่สูงขึ้นและประสิทธิภาพที่แข็งแกร่งยิ่งขึ้น L298N เป็นตัวเลือกที่ดีกว่า
ในที่สุดการตัดสินใจระหว่าง L293D และ L298N บานพับตามข้อกำหนดของโครงการเฉพาะซึ่งรวมถึงประเภทของมอเตอร์ที่ใช้ความต้องการในปัจจุบันและสภาพแวดล้อมการดำเนินงานICS ทั้งสองได้แสดงให้เห็นถึงคุณค่าของพวกเขาในการใช้งานจริงจำนวนมากโดยให้โซลูชันการควบคุมมอเตอร์ที่เชื่อถือได้และมีประสิทธิภาพ
ลักษณะของ L293D และ L298N
คุณสมบัติและแอปพลิเคชัน L293D
L293D Motor Driver IC แสดงความสามารถที่หลากหลายเหมาะสำหรับการใช้งานที่หลากหลายมีให้บริการทั้งในแพ็คเกจ DIP และ SOICทำไมเรื่องนี้ถึง?มันเพิ่มความยืดหยุ่นสำหรับการออกแบบแผงวงจรที่แตกต่างกันมันรวมถึงอุณหภูมิเกินจริงในตัวและการป้องกันกระแสเกินเพิ่มความมั่นคงภายใต้เงื่อนไขที่หลากหลาย
ข้อกำหนดที่สำคัญ
- ขับเคลื่อนทั้งมอเตอร์ DC และ Stepper
- กระแสไฟสูงถึง 1.2A
คุณสมบัติเหล่านี้ทำให้สามารถปรับให้เข้ากับระบบควบคุมได้หลายระบบหรือไม่?อย่างแน่นอน.
การใช้งานในโครงการ
ในสถานการณ์จริง L293D มักถูกเลือกสำหรับโครงการขนาดเล็กและวัตถุประสงค์ทางการศึกษาลองนึกภาพงานอดิเรกที่สร้างหุ่นยนต์ง่ายๆผู้เริ่มต้นมักจะชอบ L293D เพื่อควบคุมการเคลื่อนไหวของมอเตอร์ทำไมมันมีประสิทธิภาพและตรงไปตรงมาในการเชื่อมต่อกับไมโครคอนโทรลเลอร์มาตรฐานเช่น Arduino หรือ Raspberry Pi
สถานการณ์เฉพาะ
- ข้อกำหนดปัจจุบันของมอเตอร์นั้นเรียบง่าย
-คุณสมบัติการป้องกันในตัวช่วยหลีกเลี่ยงความเสียหายในช่วงการลัดวงจรหรือการโอเวอร์โหลดความร้อน
เมื่อมีการปฏิบัติตามเงื่อนไขเหล่านี้อายุการใช้งานของระบบโดยรวมสามารถขยายได้
คุณสมบัติและแอปพลิเคชัน L298N
L298N Motor Driver IC ประกอบด้วยวงจร H-Bridge สองวงสิ่งนี้หมายความว่าอย่างไรสำหรับผู้ใช้?ช่วยให้สามารถควบคุมทิศทางและความเร็วของมอเตอร์ DC สองทิศทางได้การกำหนดค่านี้เป็นประโยชน์อย่างยิ่งในแอพพลิเคชั่นไดรฟ์คู่มอเตอร์เช่นหุ่นยนต์และระบบยานยนต์
ข้อกำหนดที่สำคัญ
- รองรับเอาต์พุตตรรกะ 5V มาตรฐาน
- เข้ากันได้กับไมโครคอนโทรลเลอร์ที่หลากหลาย
L298N ใช้งานง่ายหรือไม่?ใช่แล้ว.พินการเชื่อมต่อทำให้กระบวนการรวมง่ายขึ้นด้วยการตั้งค่าอิเล็กทรอนิกส์ต่างๆมันสามารถปรับความเร็วมอเตอร์โดยใช้สัญญาณการปรับความกว้างพัลส์ (PWM)
การใช้งานในโครงการ
แอปพลิเคชั่นที่ใช้งานได้จริงที่ L298N เก่งในการพัฒนาแพลตฟอร์มหุ่นยนต์ขนาดเล็ก-คิดโปรแกรมการศึกษาต้นกำเนิดหรือหุ่นยนต์ปรับสมดุลด้วยตนเอง DIYมันจัดการกระแสที่สูงขึ้นและให้การควบคุมที่เชื่อถือได้ภายใต้เงื่อนไขที่ต้องการ
สถานการณ์เฉพาะ
- สภาพแวดล้อมที่ต้องการการประสานงานมอเตอร์ที่ซับซ้อน
ที่นี่ L298N กลายเป็นสิ่งที่ขาดไม่ได้
มุมมองเปรียบเทียบ
จากมุมมองที่กว้างขึ้นการเลือกระหว่าง L293D และ L298N มักขึ้นอยู่กับข้อกำหนดของแอปพลิเคชันเฉพาะปัจจัยต่าง ๆ เช่นความสามารถในปัจจุบันข้อ จำกัด ขนาดและการควบคุมความซับซ้อนมีบทบาทสำคัญในการตัดสินใจ
เกณฑ์การเลือก
- สำหรับการควบคุมที่แข็งแกร่งและเอาต์พุตปัจจุบันที่สูงขึ้น: L298N
- สำหรับบริบททางการศึกษาและแอปพลิเคชันที่เรียกร้องน้อยกว่า: L293D
จากประสบการณ์ของฉันเกณฑ์เหล่านี้มักจะกำหนดตัวเลือกที่ดีที่สุด
ทั้ง L293D และ L298N เป็นเครื่องมือที่มีค่าสำหรับทุกคนที่เกี่ยวข้องกับอุปกรณ์อิเล็กทรอนิกส์และหุ่นยนต์ตั้งแต่ผู้เริ่มต้นไปจนถึงผู้ใช้ขั้นสูงพวกเขามีความหลากหลายเชื่อถือได้และใช้งานง่ายทำให้พวกเขาจำเป็นในโครงการต่าง ๆ และความพยายามทางการศึกษา
ความแตกต่างระหว่าง L293D และ L298N
การบรรจุหีบห่อ
L293D รวบรวมแพ็คเกจแบบอินไลน์คู่ (DIP) ซึ่งมีระดับความกะทัดรัดในระดับหนึ่งที่สำคัญในการออกแบบที่ จำกัด พื้นที่การจัดการขนาดกะทัดรัดนี้พิสูจน์ให้เห็นว่าขาดไม่ได้ในโครงการที่ประสิทธิภาพเชิงพื้นที่เป็นหัวใจสำคัญอีกทางเลือกหนึ่ง L298N มีแพ็คเกจอินไลน์หลายพินเพิ่มความเหมาะสมสำหรับแอพพลิเคชั่นพลังงานสูงที่จำเป็นต้องมีการรวมตัวทางกายภาพที่แข็งแกร่ง
ทำไมเราถึงเห็นความแปรปรวนเด่นชัดในบรรจุภัณฑ์ระหว่างไดรเวอร์เหล่านี้?
คำตอบอยู่ในขอบเขตแอปพลิเคชันที่ตั้งใจไว้และการจัดการพลังงานที่จำเป็น
กระแสไฟฟ้าและแรงดันไฟฟ้า
L293D ส่งกระแสสูงสุด 600mA ต่อ H-Bridge ซึ่งสูงถึง 1.2A สำหรับระยะเวลาสั้น ๆในทางตรงกันข้าม L298N ให้ความจุปัจจุบัน H-Bridge ที่แข็งแกร่งอย่างมีนัยสำคัญของ 2A ซึ่งทำงานภายในช่วงแรงดันไฟฟ้ากว้าง 2.5V ถึง 48Vความแตกต่างอย่างสิ้นเชิงนี้จะแยกโดเมนแอปพลิเคชันของพวกเขา: ความคิดริเริ่มการศึกษาที่มีน้ำหนักเบาเมื่อเทียบกับรถยนต์รุ่นที่ต้องการเครื่องยนต์
ความสามารถในปัจจุบันมีอิทธิพลต่อการเลือกโครงการอย่างไร?
ในสาระสำคัญความจุปัจจุบันที่สูงขึ้นแปลว่าขอบเขตการปฏิบัติงานที่มากขึ้นสำหรับการโหลดที่หนักกว่า
ประเภทชิป
L293D ได้รับการปรับแต่งโดยเนื้อแท้สำหรับแอปพลิเคชันมอเตอร์สเต็ปเปอร์โดยเน้นความแม่นยำในการควบคุมตำแหน่งในขณะเดียวกัน L298N ในฐานะไดรเวอร์ H-Bridge มีความสามารถในการจัดการทั้งมอเตอร์ DC และแอคทูเอเตอร์ภายใต้สภาวะปัจจุบันที่สูงขึ้นDIY Electronics Hobbyists มักจะโน้มน้าว L293D สำหรับงานควบคุมที่แม่นยำในขณะที่ความเก่งกาจของ L298N พบว่ามีความโปรดปรานในการใช้งานที่มีพลังมากขึ้น
ข้อกำหนดด้านความร้อน
ภายใต้เงื่อนไขการโหลดที่สำคัญ L293D อาจจำเป็นต้องให้ความช่วยเหลือในการระบายความร้อนน้อยที่สุดเนื่องจากการสะสมความร้อนในทางกลับกัน L298N ต้องการโซลูชันการระบายความร้อนที่ครอบคลุมมากขึ้นอย่างมีนัยสำคัญเช่น Sinks Heat Sinks หรือ Cooling Fans เพื่อต่อต้านการสะสมความร้อนตัวอย่างเช่นการทำงานอย่างต่อเนื่องของมอเตอร์พลังสูงด้วย L298N บังคับให้ผู้ปฏิบัติงานใช้กลยุทธ์การจัดการความร้อนที่แข็งแกร่งเพื่อป้องกันไม่ให้เกิดความร้อนสูงเกินไป
การจัดการความเย็นเชิงรุกเป็นสิ่งสำคัญในการออกแบบอิเล็กทรอนิกส์หรือไม่?
มาตรการการระบายความร้อนเชิงรุกมีความสำคัญต่อการรักษาความสมบูรณ์ของระบบและอายุการใช้งานที่ยืนยาว
อินเทอร์เฟซควบคุม
L293D ใช้การควบคุมระดับตรรกะสำหรับการจัดการทิศทางและสถานะในขณะที่ L298N ขยายสิ่งนี้โดยการรวมสัญญาณ PWM สำหรับการควบคุมความเร็วที่เหมาะสมพร้อมกับการควบคุมทิศทางระดับตรรกะการควบคุมที่เหมาะสมที่สุดนี้นำเสนอโดย L298N พิสูจน์เครื่องมือสำหรับแอปพลิเคชันที่ต้องปรับความเร็วอย่างพิถีพิถัน
การแสดงตนของ Optocoupler
การขาด optocoupler ใน L293D จะช่วยยกระดับความไวต่อการรบกวนของไมโครคอนโทรลเลอร์ในทางกลับกันการแยก Optocoupler แบบรวมของ L298N ช่วยเพิ่มความมั่นคงของระบบซึ่งเป็นปัจจัยในการตัดสินใจในแอพพลิเคชั่นที่เต็มไปด้วยเสียงอิเล็กทรอนิกส์หรือต้องการความเที่ยงตรงของสัญญาณ
การรวมตัวกันของ Optocoupler เป็นตัวเลือกการออกแบบโดยเจตนาสำหรับสภาพแวดล้อมที่ไวต่อเสียงรบกวน
ฟังก์ชั่น
ทั้ง L293D และ L298N เป็นไดรเวอร์คู่สะพานที่สามารถจัดการมอเตอร์ DC สองตัวหรือมอเตอร์สเต็ปเปอร์หนึ่งตัวอย่างไรก็ตาม L298N สามารถจัดการกับความต้องการปัจจุบันที่สูงขึ้นอย่างมากวิศวกรแนวทางให้เลือก L293D สำหรับงานปัจจุบันที่ต่ำกว่าและเปลี่ยนไปใช้ L298N สำหรับแอปพลิเคชันปัจจุบันที่สูงขึ้น
สถานการณ์แอปพลิเคชัน
L293D พบช่องในแอพพลิเคชั่นพลังงานต่ำเช่นโครงการการศึกษาหรือหุ่นยนต์จิ๋วในทางกลับกัน L298N นั้นเหมาะสำหรับสถานการณ์ที่ต้องการมากขึ้นรวมถึงหุ่นยนต์ขั้นสูงและรถยนต์รุ่นมอเตอร์จากข้อมูลเชิงลึกในทางปฏิบัติจะเห็นได้ชัดว่าการเลือกไดรเวอร์เหล่านี้มีผลต่อประสิทธิภาพและความน่าเชื่อถือของโครงการอย่างมาก
โดยรวมแล้ว L293D และ L298N สนับสนุนการควบคุมไปข้างหน้าและย้อนกลับของมอเตอร์ DC รวมถึงการควบคุมความเร็ว PWMการใช้งานที่เปลี่ยนได้ของพวกเขาในแอปพลิเคชันต่าง ๆ มีมูลค่าสูงโดยเฉพาะอย่างยิ่งในระหว่างการสร้างต้นแบบและการพัฒนาซ้ำที่มีความยืดหยุ่นและการดำเนินการที่เชื่อถือได้
คำถามที่พบบ่อย [คำถามที่พบบ่อย]
1. L293D คืออะไร?
คุณเคยสงสัยหรือไม่ว่าอะไรทำให้มอเตอร์ DC ขนาดเล็กทำงานได้อย่างราบรื่นทั้งสองทิศทาง?ป้อน L293D-ไดรเวอร์มอเตอร์ 16 พิน ICมันสามารถควบคุมมอเตอร์ DC สองตัวพร้อมกันจัดการกระแสไดรฟ์แบบสองทิศทางสูงสุด 600mA และทำงานภายในช่วงแรงดันไฟฟ้าตั้งแต่ 4.5V ถึง 36Vนั่นไม่ใช่อเนกประสงค์เหรอ?
2. ฟังก์ชั่นของไดรเวอร์ L293D คืออะไร?
L293D ไม่ได้เกี่ยวกับการวิ่งมอเตอร์ในทิศทางที่แตกต่างกันIC ไดรเวอร์นี้ได้รับการออกแบบมาเพื่อรองรับกระแสไดรฟ์แบบสองทิศทางสูงสุด 600mA ภายในช่วงแรงดันไฟฟ้า 4.5V ถึง 36Vความถนัดสำหรับการขับขี่โหลดแบบอุปนัยเช่นรีเลย์โซลินอยด์มอเตอร์ DC และแม้แต่มอเตอร์สเต็ปสองขั้วก็ยังเป็นที่น่าสังเกตวิศวกรยึดมั่นในการใช้พลังงานต่ำและรอยเท้าขนาดกะทัดรัดโดยเฉพาะอย่างยิ่งในโครงการงานอดิเรกหรือแอพพลิเคชั่นที่มีประสิทธิภาพเป็นลำดับความสำคัญมันไม่น่าหลงใหลที่ส่วนประกอบเล็ก ๆ เช่นนี้สามารถสร้างผลกระทบที่ยิ่งใหญ่เช่นนี้ได้หรือไม่?
3. L298N ใช้พลังงานเท่าไหร่?
L298N เอนตัวลงบนชิปไดรเวอร์มอเตอร์ H-Bridge Motor L298N ที่ได้รับรางวัลมันกระฉับกระเฉงช่วงการทำงานของแรงดันไฟฟ้า 5V ถึง 35V ถือความสามารถในการขับเคลื่อนมอเตอร์ด้วย 2A ของปัจจุบันต่อช่องความสามารถนี้ทำให้เป็นไปได้สำหรับหุ่นยนต์และโครงการระบบอัตโนมัติอุตสาหกรรมที่ได้รับคำสั่งให้กระแสและแรงดันไฟฟ้าสูงขึ้นที่น่าสนใจคุณจะไม่พูดว่าความแข็งแกร่งของมันคือความสามารถในการใช้พลังงานสูงหรือไม่?
4. L298N สามารถควบคุมมอเตอร์ได้กี่ตัว?
จากมุมมองของผู้ใช้โมดูล L298N มีความหลากหลายสูงมันสามารถควบคุมมอเตอร์ DC ได้สูงสุด 4 ตัวหรือจัดการมอเตอร์ 2 DC พร้อมคุณลักษณะการควบคุมทิศทางและความเร็วความเก่งกาจนี้หมายความว่าพบบ้านในการกำหนดค่าการควบคุมมอเตอร์ที่ซับซ้อนซึ่งพิสูจน์ได้ว่าขาดไม่ได้ในหุ่นยนต์เพื่อการศึกษาและโครงการระบบอัตโนมัติ DIYคุณจะสร้างอะไรด้วยเครื่องมือที่ยืดหยุ่นเช่นนี้?
5. ความแตกต่างระหว่าง L293D กับ L298N คืออะไร?
เมื่อเปรียบเทียบ L293D และ L298N Motor Driver ICS มันเป็นสิ่งสำคัญในการแยกแรงดันไฟฟ้าและความสามารถในปัจจุบันของพวกเขาL293D ทำงานในช่วงแรงดันไฟฟ้า 4.5V ถึง 36V และสามารถจัดการได้สูงถึง 600mA ของปัจจุบันต่อช่องสิ่งนี้ทำให้เหมาะสำหรับมอเตอร์ DC ขนาดเล็กถึงขนาดกลางในทางกลับกัน L298N เก่งในช่วงการปฏิบัติงานสูงถึง 46V และความสามารถในการจัดการได้มากถึง 2A ต่อช่องทางเหมาะสำหรับมอเตอร์ขนาดใหญ่หรือสถานการณ์ที่ต้องการมากขึ้นดังนั้นในขณะที่การเลือกระหว่างสองสิ่งนี้จำเป็นต้องประเมินแรงดันไฟฟ้าและความต้องการในปัจจุบันของแอปพลิเคชันเฉพาะของคุณอย่างใกล้ชิดเพื่อให้แน่ใจว่าประสิทธิภาพและความน่าเชื่อถือคุณเคยเผชิญกับสถานการณ์การตัดสินใจเช่นนี้หรือไม่?
การทดสอบฟังก์ชั่นผลิตภัณฑ์ที่มีประสิทธิภาพสูงสุดและบริการที่ดีที่สุดคือความมุ่งมั่นนิรันดร์ของเรา
บทความร้อน
- CR2032 และ CR2016 ใช้แทนกันได้
- MOSFET: คำจำกัดความหลักการทำงานและการเลือก
- การติดตั้งและทดสอบรีเลย์การตีความไดอะแกรมการเดินสายรีเลย์
- CR2016 เทียบกับ CR2032 ความแตกต่างคืออะไร
- NPN กับ PNP: อะไรแตกต่างกัน?
- ESP32 VS STM32: ไมโครคอนโทรลเลอร์ตัวไหนดีกว่าสำหรับคุณ?
- LM358 คู่มือการใช้งานที่ครอบคลุมของแอมพลิฟายเออร์คู่: Pinouts, ไดอะแกรมวงจร, เทียบเท่า, ตัวอย่างที่มีประโยชน์
- CR2032 VS DL2032 VS CR2025 คู่มือการเปรียบเทียบ
- การทำความเข้าใจความแตกต่าง ESP32 และ ESP32-S3 การวิเคราะห์ทางเทคนิคและประสิทธิภาพ
- การวิเคราะห์โดยละเอียดของวงจร RC Series
 ใช้พลังงานเคมีเพื่อผลิตกระแสไฟฟ้า
ใช้พลังงานเคมีเพื่อผลิตกระแสไฟฟ้า
2024-07-15
 1N4148 สัญลักษณ์ไดโอดสลับสัญญาณขนาดเล็กหลักการทำงานแพ็คเกจและรายละเอียดอื่น ๆ
1N4148 สัญลักษณ์ไดโอดสลับสัญญาณขนาดเล็กหลักการทำงานแพ็คเกจและรายละเอียดอื่น ๆ
2024-07-12
หมายเลขชิ้นส่วนร้อน
 GRT155R61C474ME01D
GRT155R61C474ME01D C3225X7R2E224M200AE
C3225X7R2E224M200AE CC0805CRNPO9BN7R0
CC0805CRNPO9BN7R0 0201ZG103KAT2A
0201ZG103KAT2A 12105E224MAT2A
12105E224MAT2A 04023A680FAT2A
04023A680FAT2A 1812CC562KAT1A
1812CC562KAT1A ZEN056V075A48LS
ZEN056V075A48LS DTA114YUAT106
DTA114YUAT106 EP1C12F256C6
EP1C12F256C6
- CY7C027V-15AXI
- TSL2584TSV
- TPS62140RGTR
- STTH200R04TV1
- ESD321DPYR
- TSC2013QRSARQ1
- LIS202DL
- MAX208CDWR
- BQ24703PWR
- LM46000PWPT
- S29GL128P90FFSS90
- HDC1000YPAR
- ADA4817-2ACPZ-R7
- TAZH156K025CRSZ0800
- LM3S1138-IQC50-A2
- APA2175DI-TRG
- LE79489-3JC
- M29W400BB-70N1
- MAX5068BAUEBD
- MC74HC04ADT
- MD4832-D512-V3Q18-X-JP
- MT29F4G08AACWC-ETC
- TA6015F-A5
- TC6384AF-0001
- UPD65881GK-040-9ET
- HX8919-B
- AMC7111DNFT
- GT913
- PRN110162002J
- R5104V004A-E2-KG
- TM6200-LF-B
- STI7111-RUC
- AML7366-M6C
- AU80610004392AA
- LCMXO1200C-4TN100C-3
- PM9015DSN-FX
- FS32K146HFT0VLQT
- LTC4012CUF-PBF
- V300B48C150AL2